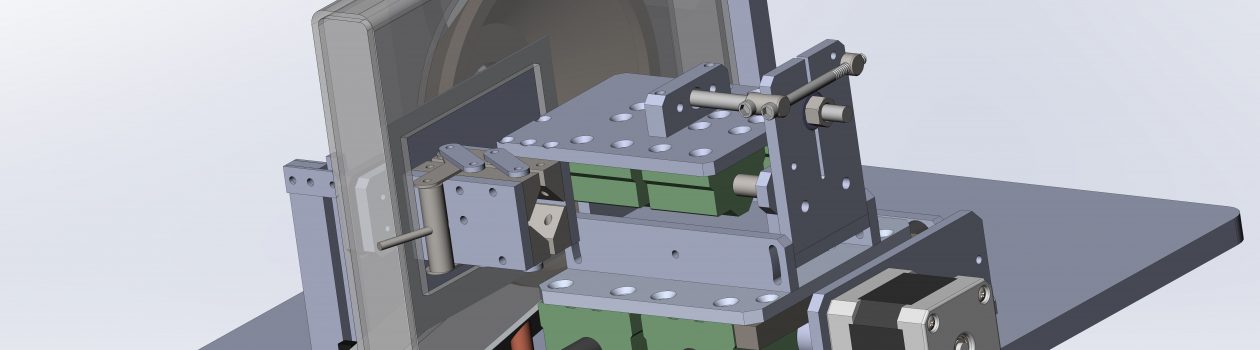
В ходе данной работы был разработан и собран станок для автоматической расточки специальных цилиндрических заготовок. Задача заключалась в необходимости определения положения кромки заготовки и постепенной расточки до уровня кромки путем итераций.
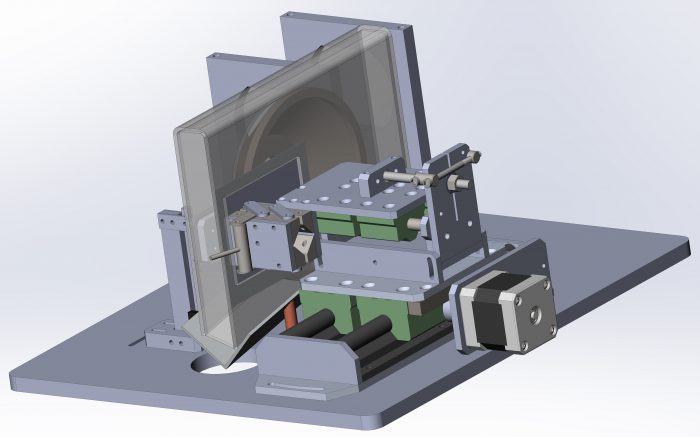
Каретка приводится в движение двумя шаговыми двигателями, которые управляются специальным контроллером на базе платы arduino. Для определения края кромки заготовки используется оптический сенсор. Человеко-машинный интерфейс сделан на основе кнопочного терминала с жидкокристаллическим дисплеем.
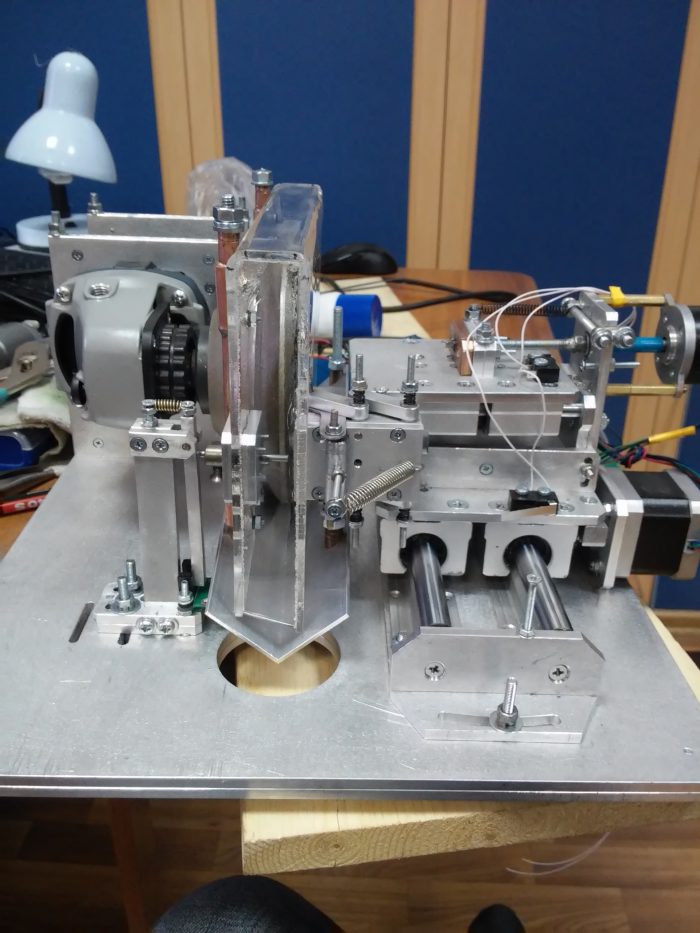
Собранный станок находится в эксплуатации и показывает высокую эффективность, позволяя существенно сократить использовании ручного труда при расточке специальных цилиндрических заготовок.